gymnasium 기반 single agent custom 강화학습 환경 만들기
아래 설명중 나오는 게임들의 예시는 다음과 같다
왜 gymnasium API를 써야 할까?
내가 느낀 주요 장점은 다음과 같다.
render메소드를 잘 구현하면 화면 녹화가 쉽다- 환경 병렬 처리가 매우 쉬워진다.
numpy의 난수 제너레이터를 통해 재현성이 쉬워진다.
- 이 뿐 아니라 다양한 Wrapper와 같이 활용이 가능하여 환경의 재구성이 편해진다.
State와 Observation은 다르다
간단하게 말하면 state는 해당 환경의 현재 상태를 파악할 수 있는 완전한 정보이고, observation은 에이전트가 관찰해서 얻은 것이라고 생각하면 된다.
어떤 게임를 학습시키는 데 학습을 어떤 측면으로 할 것인가에 따라 observation을 어떻게 주느냐가 다르다.
예를 들어 Atari같은 경우 다음 그림을 보자
이 게임의 경우 observation을 두 가지 형태로 줄 수 있다.
- 캡처된 한 프레임 정보 (이 경우 observation은 (height, width, channel) 형식이 될 것이다)
- 캡처된 한 프레임 정보 + 공의 방향 + 공의 속도 + 공의 가속도
여기는 자기가 어떤 환경을 해결할 것인가에 따라 다르다. 해당 환경이 공의 추가 정보가 절대 주어지지 않는다면 1번으로 구현하여 FrameStack을 하는 것이 맞을 것이다. 이처럼 자신이 해결/검증/증명 하려는 방식에 따라 observation을 주면 된다. 모두 준 다음에 사람이 observation을 선택하게 해도 된다.
게임이 사용자를 종료시키는 특징을 생각하자
혼자하는 게임의 경우 여러 종류가 있는데 두 가지 종류가 있다.
- 시간적 요소로 사용자의 실수를 유발하는 게임
- 시간적 요소에 관계없이 사용자의 지능만 사용하는 게임
테트리스같은 경우 시간이 지날수록 블럭이 떨어지는 속도가 빨라져 사용자의 실수를 유발하는 게임이다. 하지만 퍼즐류 게임은 그렇지 않다. 인공지능 환경 특성상 한 스텝이 지나고 게임을 멈추고 학습을 하기 때문에 시간적으로 사용자의 실수를 유발하는 “피지컬” 류 게임은 강화학습을 넘어 엔지니어링적인 (추론 속도를 높이거나 latency를 줄이기) 요소가 더 클 수 있으니 이럴 때는 학습 모델의 크기를 잘 고려해야 한다.
게임의 한 step이 무엇일지를 생각하자
보통은 한 프레임으로 정의된다. 턴제 기반의 게임의 경우는 한 턴이 한 step이 된다. 그런데 제한 시간 안에 어떤 행동을 해야 하는 턴제 기반의 경우 제한 시간을 환경에서 구현하기 보다는 모델측에서 최적화 하도록 하는 것이 좋다. (강화학습 환경에서 ‘시간’은 대게 의미가 없다.)
환경의 Observation Space와 Action Space를 생각하자
본인의 형식이 Space에 없을 수도 있는데, 이럴 때는 어쩔수 없다.
shape
Observation Space의 경우 학습이 편하도록 observation을 리턴할 수도 있지만 보통은 게임 형식을 그대로 따르는 것이 좋다.
- ex) 2d
(n, n)격자 게임인데 학습이 편하도록(1, n, n)으로 리턴
dtype
환경에 맞는 데이터 타입을 미리 생각하고 그에 맞춰 환경을 구현해야 한다. 크기는 용량이 클 수록 줄이도록 고민하는 것이 좋다. 환경이 n개 병렬처리 될 때마다 용량이 n배로 늘어나기 때문에 사용자를 위해 최대한 줄이는 것이 좋다.
또한 예를 들어 본인 환경에는 음수가 절대 나올 수 없을 경우 dtype을 unsigned로 지정하는 것이 좋다. 근데 주의할 것은 이럴 경우 내부적으로 처리할 때 알고리즘 구현시 음수를 사용하지 못할 수 있으니 주의해야 한다.
위같은 (15, 15) 크기의 이미지를 리턴한다고 하자, 각 요소들은 0아니면 1의 값을 갖기 때문에 dtype을 np.uint8로 했다고 하자. 그렇다면 저 배열을 내부적으로 처리할 때는 버그가 일어나기 때문에 음수가 되면 안된다. 이 때문에 내부적인 알고리즘도 잘 고려되어 처리되어야 한다.
high, low
1
gymnasium.spaces.Box(low, high, shape=None, dtype=np.float32, seed=None)
spaces.Box에서 사용되는 인수이다. 내부 알고리즘 구현과도 관계되는 내용인데, 꼭 사람이 보는 화면과 observation이 같을 필요가 없다. 예를 들어 2048게임을 보자
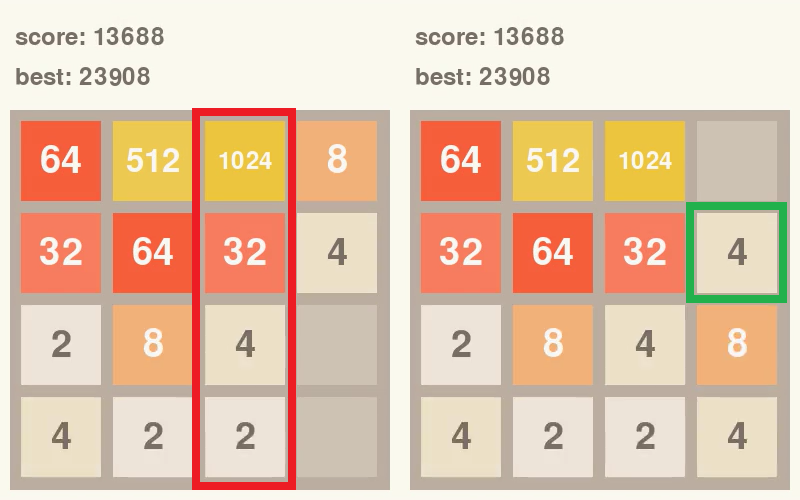
위같은 경우 다양한 숫자들이 있는데 2의 제곱수들이다. 이 경우 2048까지 가능할 경우 high의 값을 2048로 할 수 있지만 모든 수는 2의 n제곱이기 때문에 11로 할 수도 있다. 이럴 경우 블록이 합쳐졌을 때 합쳐진 블록이 해당 두수의 합으로 하거나, 아니면 합쳐진 블록의 숫자 + 1로 처리될 수 있는데 어차피 구현은 둘다 크게 어렵지 않으니 메모리, observation으로 나타내는 방식 등 다양한 방면으로 고려하고 선택하는 것이 좋다.
2048로 예를 들면
- 매우 큰 숫자를 목표로 하고 해당 숫자에 도달하면서 보드의 숫자가 매우 커졌을 때 데이터 처리시 오버플로가 일어날 수 있다.
- 또한 정규화를 위해 목표 숫자로 나누어 범위를 0과 1사이로 만든다 했을 때 숫자가 극히 작아질 수 있다.
- 따라서 위의 경우라면 2^n 숫자를 나타낼 때 내부에서 n으로 나타내는 것이 좋을 것이다. 이렇게 다방면으로 고려하자.
Illegal action 처리에 대해 고민하자
illegal, invalid가 혼용되서 쓰일 수 있는데, 이 글에서는 같은 의미이다.
일단 정의되지 않은 행위(실제로 있는 말은 아님)와 구분해야 한다. invalid/illegal action는 해도 되는데 하면 안되는 행위라고 칭하고 싶다.
하면 안되는 행위는 바둑을 예로 들어보자 바둑판은 19X19의 칸으로 구성되어 있다.
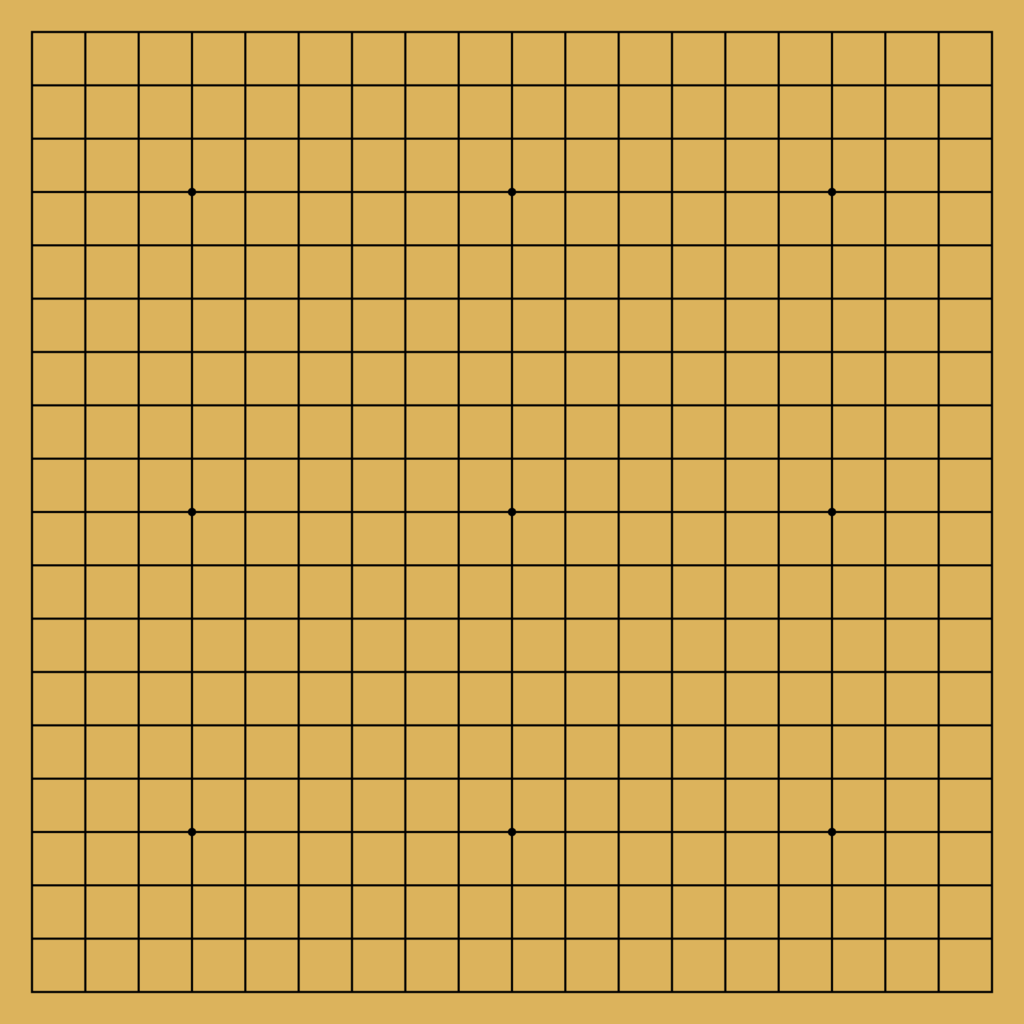
그럼 아마 환경을 만들때 action_space를 MultiDiscrete([19, 19]) 혹은 Discrete(361)로 정의를 하게 될 것이다. 후자는 [x // 19, x % 19]로 바꾸면 전자와 같기에 설명을 위해 표기는 전자의 방식을 하겠다. 전자의 경우 index는 0부터 시작하여 [x, y]는 x행의 y열에 돌을 두는 행위라고 하자, 이때 여기서는 만약 x, y가 19 이상의 값을 가진다면 이것은 오류를 발생시켜야 한다. 아마 해당 값이 action_space에 속해있지 않기 때문에 에러를 발생시킬 것이다. 예를 들어 [20, 20] 처럼 20행, 20열에는 돌을 둘 수 없기 때문이다.
그런데 다음 경우를 보자
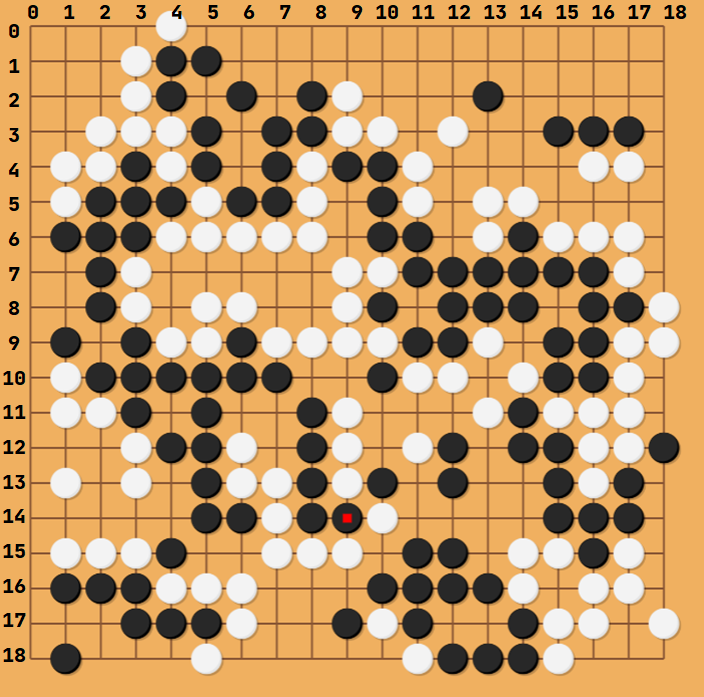
여기에 action으로 [1, 3]을 한다고 생각하자, 해당 action은 문제가 없어 보인다. 하지만 생각해야할 점이 있다. 해당 위치에는 이미 흰돌이 있기 때문에 돌을 놓을 수 없기 때문이다. 근데 앞에서 소개한 돌을 놓을 수 없다는 것과는 의미가 약간 다르다. 앞에서 말한 ‘안된다’는 것은 아예 정의되지 않은 행위이기 때문이고 뒤에서 말한 ‘안된다’는 가능한 행위이나 게임 내적 규칙으로 인해 유효하지 않은 행위이기 때문이다.
이와 비슷하게 의미없는 행동들이 있다.
- 2048 게임에서 아무 블록도 움직이지 않는 방향으로 키를 입력하는 행위
- Snake-game에서 가는 방향의 반대방향의 키를 입력하는 행위
- Breakout에서 하단바가 맨 오른쪽에 있는데 오른쪽으로 움직이는 행위
이런 행위들에 바로 assert를 통해 환경을 종료하거나, 그냥 무시 (No action)하는 방법이 있는데 개인적으로는
“Action에 관계없이 게임이 흘러가는가”를 기준으로 본다
바둑, 체스 2048의 경우는 해당 행동을 제외하고 다른 행동을 하지않으면 게임이 흘러가지 않는다. 하지만 snake-game 같은 경우는 가만히 있으면 snake가 다른 곳에 박아서 게임이 끝나고, breakout의 경우는 내 행동에 관계 없이 공이 이리저리 움직이기 때문에 게임이 진행될 것이다.
이와 같이 action에 관계없이 게임이 흘러갈 경우 해당 action을 “아무것도 안함”으로 처리하고 그렇지 않을 경우 게임을 끝내버리는 것이 좋다.
게임을 끝내버리는 것에는 여러 방법이 있는데
- Illegal action인지를 판단해 Wrapper를 이용해
termination = True를 이용해 게임을 끝내는 방법 - 게임 내부적으로
assert를 하는 방법
개인적으로 여기서는 multi-agent의 경우 assert를 하고 single-agent의 경우 아무 행동도 하지 않은 것으로 처리후 Wrapper를 이용해 처리한다. 왜냐하면 multi-agent는 구현상 진행이 안되지만(아무 행동도 하지 않고 상대 턴으로 넘길 수가 없기 때문에) single-agent의 경우는 진행 자체는 되기 때문이다.
Action Masking을 구현하는 것이 좋다
사실 본인의 환경을 공개할 것이라면 사용자의 편의를 위해서라도 구현해놓는 것이 맞다고 생각한다. 그렇게 어차피 구현할 것이라면 현재 상태의 action의 valid 여부를 판단하기 쉽다 (이것은 편하다는 것이지, 이것을 위해 구현해야 한다는 뜻은 아니다.)
물론 action masking을 구현한다면 내부 처리시 모든 action에 대해 illegal(or invalid) 여부를 판단해야 하기 때문에 action이 너무 많으면 시간이 오래 걸릴 수 있다.
하지만 대부분 invalid action은 마스킹 해주는 것이 대부분 성능이 더 높기도 하고 본인 환경의 이해라던지, 편의를 위해서라도 좋다는 생각이다.
Action Masking은 여러 방법이 있지만 보통은 Action Space에서 legal action은 1로, illegal action은 0으로 하여 리턴한다.
예를 들어 4개의 행동 중 하나를 선택하는데 0, 1 번째 행동이 legal, 2, 3번째 행동이 illegal action이라면 np.arrray([1, 1, 0, 0]) 을 리턴한다. 나의 경우는 info 에 넣는다.
이렇게 구현된 action masking 은 아래와 같이 sample method와 같이 활용될 수 있다.
1
gymnasium.spaces.space.Space.sample(self, mask: Any | None = None) → T_cov
mask– A mask used for sampling, expected dtype=np.int8 and see sample implementation for expected shape.
보상은 어떻게 주어질 지를 생각하자
보통은 승리시 1, 패배시 -1로 하는 것이 일반적이다. 게임을 더 빨리 끝내고 싶은 경우 한 step마다 약간의 음의 보상을 줄 때가 있는데 이때 두 방식이 충돌하게 된다.
- 최대한 빨리 보상을 먹고 게임을 클리어 해야지
- 음의 보상이 누적될 바엔 빨리 죽어버리자
개인적인 해결책으로는 보상이 희귀하지 않게 하거나 최대한 많은 게임을 돌리는 것이었다.
또한 다른 측면으로는 보상은 노력에 비례하는 것이 좋다 (개인적인 경험). 환경 구현 측면이라기 보다 강화학습 측면에서 설명될 수 있지만, 예를 들어 2048게임에서 2 블록 두개를 합쳐서 4의 블록을 만드는 데 2의 보상을 주고 128 블록을 두개 합쳐서 256의 블록을 만드는 데 8의 보상을 더 준다고 해보자
그렇다면 에이전트는 256의 블록을 만드는 데 2의 블록이 128개 필요한데도 불구하고 보상은 4배 차이밖에 안들기 때문에 고생해서 128 두개를 합칠바에 2블록 두개를 합치자고 생각할 것이다. 그렇기에 “어떤 보상을 얻기 위해 드는 노력에 비례해 보상을 설계하는 것이 좋다”
내 환경이 MDP를 만족하는지 생각하자
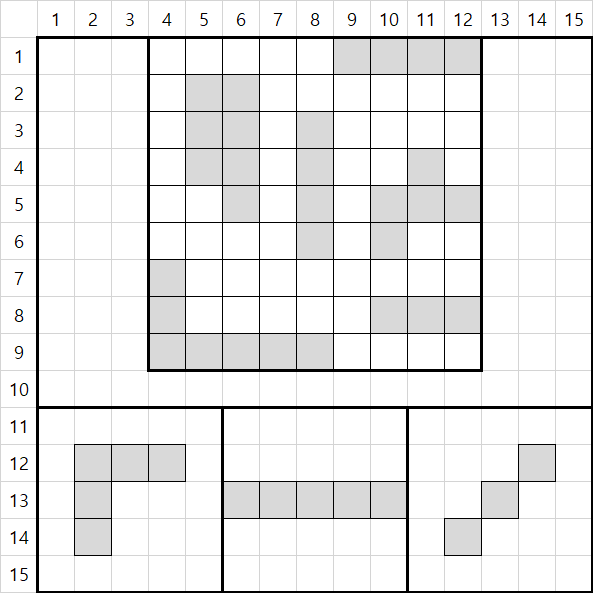
예를 들어 다음과 같은 snake-game을 설계한다고 해보자
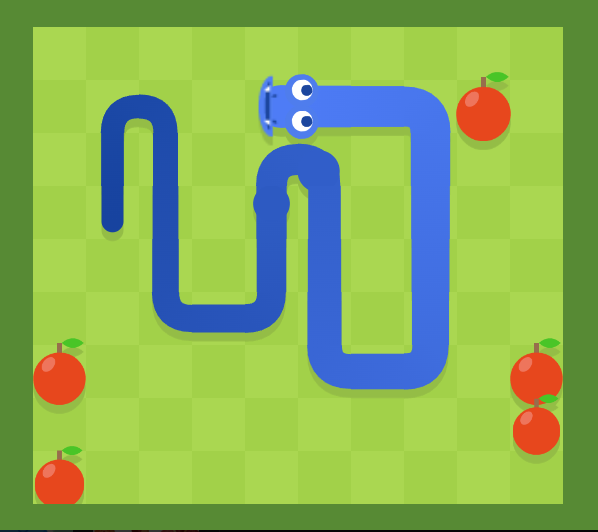
사람이 플레이하는 측면에서 해당 게임을 클리어하는 에이전트를 만들기 위한 강화학습 환경을 만들기 위해 사과는 1, 뱀은 2, 나머지는 0으로 observation을 설계한다고 하자. 그렇다면 이것은 좋은 환경일까?
그렇지 않다.
다음 그림을 보자 내 학습 모델은 해당 그림을 다음과 같이 인식할 것이다.
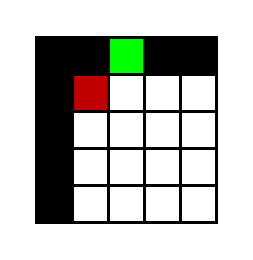
하얀색이 뱀(2), 초록색이 사과(1), 나머지 공간은 검은색(0)이다. 위의 경우 가만히 있을 때 뱀은 어디로 가는지 알 수 없다. 위로 가는 것일까? 왼쪽으로 가는 것일까? 몸통은 어떻게 꼬여 있을까?
이럴 경우 어느 이상으로 환경이 복잡해지면 학습이 더이상 되지 않을 것이다. 이럴 경우 문제를 알아차리기 정말 힘든데 내가 해당 observation만 봤을때 게임을 클리어할 수 있을지를 제대로 판단해야 한다.
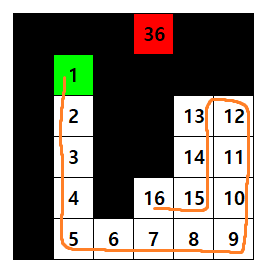
위와 같은 경우는 몸통부터 머리까지 각각 다른 번호를 부여하여 문제를 해결할 수 있다.
만족하지 않을 경우 Wrapper를 고려해볼 수 있다.
난수를 얻을 때는 self.np_random을 사용하자
np_random - The random number generator for the environment. This is automatically assigned during super().reset(seed=seed) and when assessing self.np_random.
난수가 global state가 아닌 각 환경별로 지정된 인스턴스에 의해 생성되도록 하는 제너레이터이다. 환경의 reproducible sampling과 thread-safe(추측)을 위한 방법이다.
deepcopy, copy를 잘 판단하자
내부 엔진을 다루다 보면 데이터들이 왔다갔다 하게 되는데 이 경우 deepcopy(.clone(), .copy())를 해야 할지 shallow copy가 더 효율적일지를 판단해야 한다.
예를 들어 테트리스의 블록들을 보관하고 있다고 하자. 그리고 그것을 화면에 나타내기 위해 복사하고 나중에 블록이 지워질 수 있다. 이 경우 shallow copy로 보드에 덮을 경우, 랜덤으로 제공하는 블록 정보가 손상될 수 있다.
observation에 관계없지만 디버깅에 도움될 정보는 info에 넣는게 좋다
action_mask는 주로 info에 들어간다.
예를 들어 Taxi 환경은 action_mask를 info에 제공한다. 출력하면 다음과 같다.
1
{'prob': 1.0, 'action_mask': array([1, 1, 1, 0, 0, 0], dtype=int8)}
p는 transition proability for the state. 를 의미한다고 한다.
이 외에도 reward와 목표가 간접적으로 연관되어 있을때 활용할 수 있다. 예를 들어 snakegame에서 목표는 뱀을 최대한 길게 만드는 것일경우 아이템을 먹는 것은 1점을 주지만 이동마다 음의 보상을 줄 경우 정확한 최종길이를 파악하기 힘들 수 있다. 이럴 경우 뱀의 길이를 info에 담아 줄 수 있다.
1
2
def _get_info(self):
return {"snake_length": len(self.snake), "prev_action": self.prev_action}
Wrapper를 적극 활용하자
class gymnasium.Env 문서의 맨 마지막에 보면 아래와 같이 적혀있다.
For modifying or extending environments use the
gymnasium.Wrapperclass
환경에서 가능한 것들과 Wrapper에서 할만한 것들이 약간 다르다. 물론 딱 잘라서 역할을 구분하기는 힘들다. 개인적인 생각은 다음과 같다.
- 환경 : 내부적인 구현에 충실
- Wrapper : 학습시 편의성을 위한 구현
일단 가장 중요한 것은 “이미 구현되어 있는 Wrapper들이 많으니 참고하여 없을 경우에 구현하자” 이다.
그 환경에 특화된 Wrapper를 구현하는 것이 좋다.
예를 들어 Snakegame에서 아무런 아이템을 먹으면 1, 게임이 끝나면 -1의 보상 그리고 이 외의 행동은 0의 보상을 준다고 하자. 그런데 게임이 더 빨리 끝나게 하기 위해 0이 아니라 -0.0001의 보상을 주고 싶다고 한다면 다음과 같은 Wrapper를 구현할 수 있다.
1
2
3
4
5
6
7
8
9
10
class RewardConverter(gym.RewardWrapper):
def __init__(self, env, moving_reward = 0):
super().__init__(env)
self.moving_reward = moving_reward
def reward(self, reward):
if reward == 0:
return self.moving_reward
else:
return reward
위의 예시에는 gym.RewardWrapper만 썼지만 gym.ObservationWrapper도 활용할 수 있다. wrapping을 원하는 곳에 해당하는 wrapper를 골라쓰는 것이 좋다.
아래는 gymnasium에서 제공하는 기본 Wrapper의 예시이다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
import gymnasium as gym
from gymnasium import spaces
class FlattenObservation(gym.ObservationWrapper, gym.utils.RecordConstructorArgs):
def __init__(self, env: gym.Env):
gym.utils.RecordConstructorArgs.__init__(self)
gym.ObservationWrapper.__init__(self, env)
self.observation_space = spaces.flatten_space(env.observation_space)
def observation(self, observation):
return spaces.flatten(self.env.observation_space, observation)
랜덤 에이전트의 평균치를 기록하면 도움이 된다.
따로 문서에 쓴다기보다는 랜덤 에이전트로 에피소드를 반복해보면서 평균 보상, 평균 에피소드 길이(step), 에피소드가 종료될 때 환경의 상태, 에이전트의 상태를 대충 알아두는 것이 알고리즘 설계시 도움이 된다.
RecordEpisodeStatistics Wrapper와 같이 활용하면 더 편할 것이다.