단단한 강화학습 코드 정리, chap8
단단한 강화학습 책의 코드를 공부하기 위해 쓰여진 글이다.
Maze
PriorityQueue
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
class PriorityQueue:
def __init__(self):
self.pq = []
self.entry_finder = {}
self.REMOVED = '<removed-task>'
self.counter = 0
def add_item(self, item, priority=0):
if item in self.entry_finder:
self.remove_item(item)
entry = [priority, self.counter, item]
self.counter += 1
self.entry_finder[item] = entry
heapq.heappush(self.pq, entry)
def remove_item(self, item):
entry = self.entry_finder.pop(item)
entry[-1] = self.REMOVED
def pop_item(self):
while self.pq:
priority, count, item = heapq.heappop(self.pq)
if item is not self.REMOVED:
del self.entry_finder[item]
return item, priority
raise KeyError('pop from an empty priority queue')
def empty(self):
return not self.entry_finder
Maze
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
# A wrapper class for a maze, containing all the information about the maze.
# Basically it's initialized to DynaMaze by default, however it can be easily adapted
# to other maze
class Maze:
def __init__(self):
# maze width
self.WORLD_WIDTH = 9
# maze height
self.WORLD_HEIGHT = 6
# all possible actions
self.ACTION_UP = 0
self.ACTION_DOWN = 1
self.ACTION_LEFT = 2
self.ACTION_RIGHT = 3
self.actions = [self.ACTION_UP, self.ACTION_DOWN, self.ACTION_LEFT, self.ACTION_RIGHT]
# start state
self.START_STATE = [2, 0]
# goal state
self.GOAL_STATES = [[0, 8]]
# all obstacles
self.obstacles = [[1, 2], [2, 2], [3, 2], [0, 7], [1, 7], [2, 7], [4, 5]]
self.old_obstacles = None
self.new_obstacles = None
# time to change obstacles
self.obstacle_switch_time = None
# initial state action pair values
# self.stateActionValues = np.zeros((self.WORLD_HEIGHT, self.WORLD_WIDTH, len(self.actions)))
# the size of q value
self.q_size = (self.WORLD_HEIGHT, self.WORLD_WIDTH, len(self.actions))
# max steps
self.max_steps = float('inf')
# track the resolution for this maze
self.resolution = 1
# extend a state to a higher resolution maze
# @state: state in lower resolution maze
# @factor: extension factor, one state will become factor^2 states after extension
def extend_state(self, state, factor):
new_state = [state[0] * factor, state[1] * factor]
new_states = []
for i in range(0, factor):
for j in range(0, factor):
new_states.append([new_state[0] + i, new_state[1] + j])
return new_states
# extend a state into higher resolution
# one state in original maze will become @factor^2 states in @return new maze
def extend_maze(self, factor):
new_maze = Maze()
new_maze.WORLD_WIDTH = self.WORLD_WIDTH * factor
new_maze.WORLD_HEIGHT = self.WORLD_HEIGHT * factor
new_maze.START_STATE = [self.START_STATE[0] * factor, self.START_STATE[1] * factor]
new_maze.GOAL_STATES = self.extend_state(self.GOAL_STATES[0], factor)
new_maze.obstacles = []
for state in self.obstacles:
new_maze.obstacles.extend(self.extend_state(state, factor))
new_maze.q_size = (new_maze.WORLD_HEIGHT, new_maze.WORLD_WIDTH, len(new_maze.actions))
# new_maze.stateActionValues = np.zeros((new_maze.WORLD_HEIGHT, new_maze.WORLD_WIDTH, len(new_maze.actions)))
new_maze.resolution = factor
return new_maze
# take @action in @state
# @return: [new state, reward]
def step(self, state, action):
x, y = state
if action == self.ACTION_UP:
x = max(x - 1, 0)
elif action == self.ACTION_DOWN:
x = min(x + 1, self.WORLD_HEIGHT - 1)
elif action == self.ACTION_LEFT:
y = max(y - 1, 0)
elif action == self.ACTION_RIGHT:
y = min(y + 1, self.WORLD_WIDTH - 1)
if [x, y] in self.obstacles:
x, y = state
if [x, y] in self.GOAL_STATES:
reward = 1.0
else:
reward = 0.0
return [x, y], reward
- (1~4) : 미로를 형성하는 클래스이다.
- (5) : 클래스 생성시 실행되는 생성자부분이다.
- (6~10) :
- 너비(가로) : 9
- 높이(세로) : 6
- (12~17) : 위, 아래, 왼쪽, 오른쪽 방향으로 이동하는 행동에 각각 0, 1, 2, 3의 번호를 부여하고
actions변수에 리스트로 저장한다. - (19~23) : 시작상태 : (2, 0), 목표 상태 : (0, 8)
- (25~28) : 초기 장애물을 설정한다.
old_obstacles,new_obstacles는 figure 8.4 에서 장애물의 위치를 바꿀때 사용한다. - (30~31) : 장애물을 바꾸게 되는 시간, 해당 시간이 지나면 장애물의 위치가 바뀐다.
- (36~37) : Q값을 저장하기 위해 정의된 Q테이블의 크기, (높이, 너비, 행동의 개수) 로 정의된다.
- (39~40) : 최대 스텝을 정의한다. 해당 스텝까지만 움직인다.
- (42~43) : 미로의 해상도를 나타낸다.
- (45~48) : 상태를 더 큰 해상도의 미로에 대응시킨다.
state: 원래 해상도의 상태factor: 확장 인자, 상태는 확장 후에 $\text{(factor)}^{2}$ 개의 상태가 된다.
- (49) : 상태를 확장된 크기에 맞게 새로운 위치로 옮긴다.
- (50) : 새로운 상태들을 저장할 리스트를 선언한다.
- (51~53) : 새로운 위치에서 행, 열 방향으로
factor만큼 확장한다.- ex)
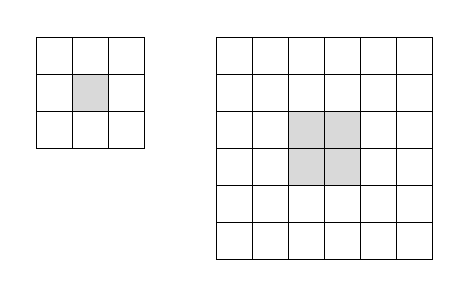
- ex)
- (54) : 새로운 상태들을 리턴한다.
- (56~58) : 미로와 미로안의 상태들을 더 큰 해상도로 확장한다.
- (59~61) : 새로운 미로를 선언하고 새로운 미로의 너비와 높이를 (기존 크기 ×
factor) 로 저장한다. - (62) : 시작 상태를 새로운 위치에 대응한다. 크기를 넓히지 않고 위치만 넣는다.
- (63) : 목표 위치를
extend_maze함수를 이용해 확장하여 저장한다. - (64~66) : 확장된 미로의 장애물을 저장할 리스트를 선언한 후 기존의 장애물을 확장하여 리스트에 추가한다.
- (67) : 새로운 미로의 Q 테이블의 크기를 저장한다.
- (69) : 새로운 미로의 해상도를 클래스 변수에 저장한다.
- (70) : 새롭게 정의된 Maze 클래스를 반환한다.
- (72~74) : 상태와 행동을 받아 새로운 상태와 보상을 반환한다.
- (75) : 인자로 받은 상태를 x, y에 저장한다.
- (76~83) : action에 해당하는 방향으로 움직인다.
max,min을 통해 미로를 벗어나지 못하게 한다. - (84~85) : 옮긴 위치가 장애물일 경우 원래 위치로 되돌린다.
- (86~89) : 옮긴 위치가 목표 위치일 경우 보상을 1로 설정하고 그 외에는 0으로 설정한다.
- (90) : 다음 상태와 보상을 반환한다.
DynaParams
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
# a wrapper class for parameters of dyna algorithms
class DynaParams:
def __init__(self):
# discount
self.gamma = 0.95
# probability for exploration
self.epsilon = 0.1
# step size
self.alpha = 0.1
# weight for elapsed time
self.time_weight = 0
# n-step planning
self.planning_steps = 5
# average over several independent runs
self.runs = 10
# algorithm names
self.methods = ['Dyna-Q', 'Dyna-Q+']
# threshold for priority queue
self.theta = 0
choose_action
1
2
3
4
5
6
7
# choose an action based on epsilon-greedy algorithm
def choose_action(state, q_value, maze, dyna_params):
if np.random.binomial(1, dyna_params.epsilon) == 1:
return np.random.choice(maze.actions)
else:
values = q_value[state[0], state[1], :]
return np.random.choice([action for action, value in enumerate(values) if value == np.max(values)])
- (1~2) : ε-greedy 정책을 기반으로 하여 행동을 선택한다.
state: 현재의 상태q_value: Q 값이 저장되어 있는 Q 테이블maze: 미로정보를 가지고 있는 Maze 클래스 인스턴스dyna_params: ε 정보가 저장된 클래스
- (3~7) : ε 의 확률로 무작위 행동을 선택하고, 1-ε 의 확률로 가장 Q값이 높은 것들 중에서 무작위로 선택한다. (
np.argmax는 가장 큰 값이 여러 개일 경우 인덱스가 낮은 것이 선택된다)
TrivialModel
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
# Trivial model for planning in Dyna-Q
class TrivialModel:
# @rand: an instance of np.random.RandomState for sampling
def __init__(self, rand=np.random):
self.model = dict()
self.rand = rand
# feed the model with previous experience
def feed(self, state, action, next_state, reward):
state = deepcopy(state)
next_state = deepcopy(next_state)
if tuple(state) not in self.model.keys():
self.model[tuple(state)] = dict()
self.model[tuple(state)][action] = [list(next_state), reward]
# randomly sample from previous experience
def sample(self):
state_index = self.rand.choice(range(len(self.model.keys())))
state = list(self.model)[state_index]
action_index = self.rand.choice(range(len(self.model[state].keys())))
action = list(self.model[state])[action_index]
next_state, reward = self.model[state][action]
state = deepcopy(state)
next_state = deepcopy(next_state)
return list(state), action, list(next_state), reward
dyna_q
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
# play for an episode for Dyna-Q algorithm
# @q_value: state action pair values, will be updated
# @model: model instance for planning
# @maze: a maze instance containing all information about the environment
# @dyna_params: several params for the algorithm
def dyna_q(q_value, model, maze, dyna_params):
state = maze.START_STATE
steps = 0
while state not in maze.GOAL_STATES:
# track the steps
steps += 1
# get action
action = choose_action(state, q_value, maze, dyna_params)
# take action
next_state, reward = maze.step(state, action)
# Q-Learning update
q_value[state[0], state[1], action] += \
dyna_params.alpha * (reward + dyna_params.gamma * np.max(q_value[next_state[0], next_state[1], :]) -
q_value[state[0], state[1], action])
# feed the model with experience
model.feed(state, action, next_state, reward)
# sample experience from the model
for t in range(0, dyna_params.planning_steps):
state_, action_, next_state_, reward_ = model.sample()
q_value[state_[0], state_[1], action_] += \
dyna_params.alpha * (reward_ + dyna_params.gamma * np.max(q_value[next_state_[0], next_state_[1], :]) -
q_value[state_[0], state_[1], action_])
state = next_state
# check whether it has exceeded the step limit
if steps > maze.max_steps:
break
return steps
- (1~6) : Dyna-Q 알고리즘을 위해 에피소드를 실행한다.
q_value: 상태-행동 의 Q값을 저장하는 Q-tablemodel: planning을 위한 모델 인스턴스maze: 환경의 정보를 저장하는Maze클래스의 인스턴스dyna_params: 알고리즘의 파라미터가 저장된 인스턴스
- (7) : 미로의 초기 상태로 현재 상태를 설정한다.
- (8) : 현재의 step을 저장할 변수를 0으로 초기화한다.
- (9) : 목표 상태(
GOAL_STATES)에 도달할 때까지 반복한다. - (10~11) :
step을 1 증가시킨다. (step이 1부터 시작한다) - (13~14) : 현재 상태, Q값을 가지고
dyna_params의 ε값에 따라 maze환경의 행동 중 하나를 선택한다. - (16~17) : 현재 상태에서 행동을 수행하고 다음 상태와 보상을 얻는다.
- (19~22) : Q값을 업데이트한다 \(Q(S,A) \leftarrow Q(S,A) + \alpha \left [ R + \gamma \underset{a}{max} Q(S', a) - Q(S,A)\right ]\)