단단한 강화학습 코드 정리, chap7
단단한 강화학습 책의 코드를 공부하기 위해 쓰여진 글이다.
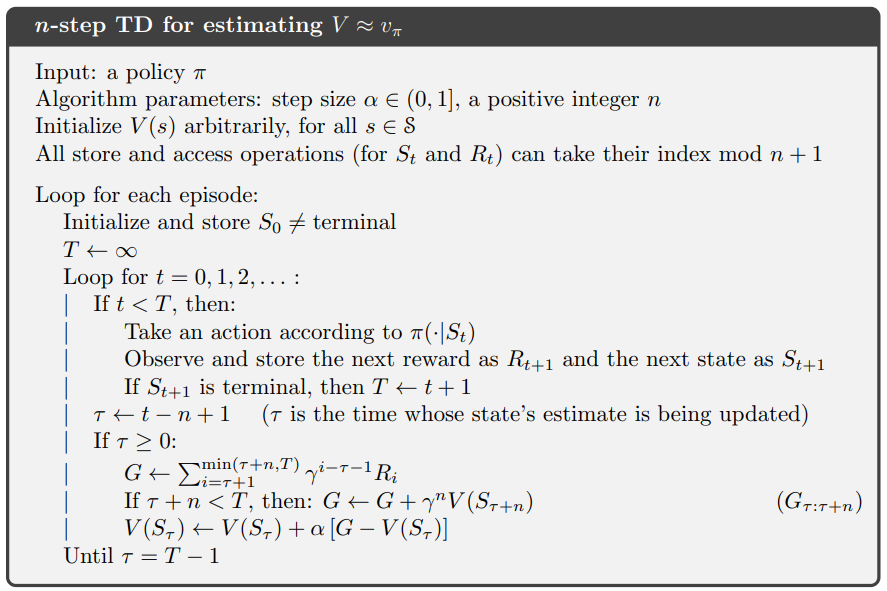
temporal difference
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
# all states
N_STATES = 19
# discount
GAMMA = 1
# all states but terminal states
STATES = np.arange(1, N_STATES + 1)
# start from the middle state
START_STATE = 10
# two terminal states
# an action leading to the left terminal state has reward -1
# an action leading to the right terminal state has reward 1
END_STATES = [0, N_STATES + 1]
# true state value from bellman equation
TRUE_VALUE = np.arange(-20, 22, 2) / 20.0
TRUE_VALUE[0] = TRUE_VALUE[-1] = 0
# n-steps TD method
# @value: values for each state, will be updated
# @n: # of steps
# @alpha: # step size
def temporal_difference(value, n, alpha):
# initial starting state
state = START_STATE
# arrays to store states and rewards for an episode
# space isn't a major consideration, so I didn't use the mod trick
states = [state]
rewards = [0]
# track the time
time = 0
# the length of this episode
T = float('inf')
while True:
# go to next time step
time += 1
if time < T:
# choose an action randomly
if np.random.binomial(1, 0.5) == 1:
next_state = state + 1
else:
next_state = state - 1
if next_state == 0:
reward = -1
elif next_state == 20:
reward = 1
else:
reward = 0
# store new state and new reward
states.append(next_state)
rewards.append(reward)
if next_state in END_STATES:
T = time
# get the time of the state to update
update_time = time - n
if update_time >= 0:
returns = 0.0
# calculate corresponding rewards
for t in range(update_time + 1, min(T, update_time + n) + 1):
returns += pow(GAMMA, t - update_time - 1) * rewards[t]
# add state value to the return
if update_time + n <= T:
returns += pow(GAMMA, n) * value[states[(update_time + n)]]
state_to_update = states[update_time]
# update the state value
if not state_to_update in END_STATES:
value[state_to_update] += alpha * (returns - value[state_to_update])
if update_time == T - 1:
break
state = next_state
- (1~2) : 모든 상태의 개수를 나타낸다. 19개이며 terminal state를 제외한 것이다.
- (4~5) : discount factor $\gamma$이며 여기서는 1이다.
- (7~8) : termial state를 제외한 상태들의 배열이다. chapter09에서 쓰이며 여기서는 쓰이지 않는다.
- (10~11) : 시작지점을 나타내며 인덱스 10이다. 그렇게 양쪽에 terminal state 1개, not terminal state 9개씩 가지게 된다. terminal state까지 합치면 $2 \times (1+9) + 1 = 21$이 된다.
- (13~16) : 두 개의 terminal states를 나타내며 맨 왼쪽(0)은 -1의 보상을 주고 맨 오른쪽(20=N_STATES+1)은 1의 보상을 준다.
- (18~20) : 벨만 방정식에 의한 참값 테이블이다. 21개의 값에 대해서 $\left [ -1, -0.9, -0.8, …, 0.8, 0.9, 1 \right ]$을 취하고 terminal state를 0으로 만들어 $\left [ 0, -0.9, -0.8, …, 0.8, 0.9, 0\right ]$의 테이블을 만든다.
- (22~26) : n-step TD 방법을 이용하여 업데이트하는 함수이다.
- value: 각 상태의 가치를 저장한 배열, 업데이트의 대상
- n : n-step에서 n을 나타내며 몇번 스텝 후에 업데이트할 것인지
- $\alpha$ : step size를 의미한다. n-step의 step size랑 다르다.
- (27~28) : 현재 상태를
START_STATE=10으로 초기화한다.
- (30~33) : 상태와 보상을 저장할 리스트를 만든다. n-step의 경우 n개의 상태와 보상만 저장하면 되지만(mod trick) 구현의 편의성을 위해 모두 저장한다.
- (35~36) : 시간을 추적할 변수를 0으로 초기화한다. 알고리즘에서 $t$를 의미한다.
- (38~39) : 종단 시간(=에피소드의 길이)를 무한대로 초기화한다.
- (40~42) : (35~36)에서 0으로 초기화한
time을 하나씩 높이며 반복문을 실행한다.
- (44) : terminal state 전까지 행동을 선택하는 행동을 반복한다. 무한대인데 어떻게 끝나냐고 할 수 있겠지만, (62~63) 에서 $T$가 변경된다.
- (45~49) : 주어진 정책에 따라 행동을 선택한다. 0과 1을 각각 50%의 확률로 선택한다. 1이 나오면
next_state = state + 1로 오른쪽으로 한 칸 가고 0이 나오면next_state=state - 1로 한 칸 왼쪽으로 간다.-
np.random.binomial(n, p): p확률로 True인 시행을 n번 했을때 True의 횟수를 출력한다. 여기서는 1, 0.5이므로 True가 1번, 0번 나올 확률은 각각 0.5, 0.5이다. $P(x)=\binom{n}{x}p^x(1-p)^{n-x}$ -
$n$ : number of trial, $p$ probability of success, $x$: number of successes.
-
-
(51~56) : next_state(다음 상태, $S_{t+1}$)가 terminal state일 경우 0이면 -1, 20이면 1을
reward($R_{t+1}$)에 대입하고 그 외의 상태에는 0을 대입한다. -
(58~60) : 행동으로 인한 다음 상태($S_{t+1}$)와 보상($R_{t+1}$)을 저장한다.
- (62~63) : 다음 상태($S_{t+1}$)가 terminal state일 경우
T에 현재time을 저장한다
- (65~66) : 업데이트될 시점을 저장한다
코드는 update_time = time - n인데 알고리즘은 왜 $\tau \leftarrow t - n + 1$일까
알고리즘의 경우 반복문을 돌면서 $t=0$으로 시작해서 반복문이 새로 시작될 때 $t$가 1이 증가하는 것으로 가정하나 코드의 경우 (41~42) 처럼 사전에 1을 증가하기 때문에 지금 시점에서는 $t$가 알고리즘상 $t+1$인 상태이므로 $n$만 뺀다.
- (67) : 업데이트 대상 시점($\tau$)이 시작 시점인 0보다 크면 상태를 업데이트한다.
- (68) : 누적 보상을 저장할 변수를 0으로 정의한다.
- (69~71) : 업데이트할 시점부터 n개의 보상에 discount factor를 적용하여
returns에 누적한다
이해를 돕기 위해 풀어쓰면 다음과 같다
\[G \leftarrow R_{\tau+1}+\gamma R_{\tau+2}+\gamma^{2}R_{\tau+3}+...+\gamma^{n-1}R_{\tau+n}\]- (72~74) : 추정 대상인 $\tau + n$이 마지막 시점이 아닐 경우 누적된
returns에 다음 상태의 추정치를 더한다. (마지막 시점일 경우 그 이후의 보상은 없으므로 추정치가 0이다)
- (75) : 업데이트 시점의 상태를
start_to_update에 저장한다update_time이 $\tau$라면start_to_date는 해당 시점의 상태인 $S_{\tau}$를 의미한다. - (76~78) : 업데이트할 상태($S_{\tau}$)가 terminal state가 아니라면 해당 상태를 업데이트한다.
- (79~80) : 업데이트 대상 시점이 terminal 바로 전이라면 반복문을 종료한다 (다음 상태는 terminal이므로 더이상 업데이트 할 것이 없다.)
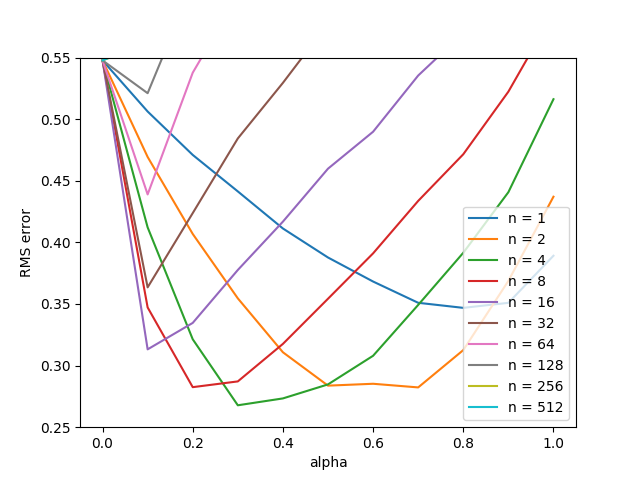
figure 7_2
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
# Figure 7.2, it will take quite a while
def figure7_2():
# all possible steps
steps = np.power(2, np.arange(0, 10))
# all possible alphas
alphas = np.arange(0, 1.1, 0.1)
# each run has 10 episodes
episodes = 10
# perform 100 independent runs
runs = 100
# track the errors for each (step, alpha) combination
errors = np.zeros((len(steps), len(alphas)))
for run in tqdm(range(0, runs)):
for step_ind, step in enumerate(steps):
for alpha_ind, alpha in enumerate(alphas):
# print('run:', run, 'step:', step, 'alpha:', alpha)
value = np.zeros(N_STATES + 2)
for ep in range(0, episodes):
temporal_difference(value, step, alpha)
# calculate the RMS error
errors[step_ind, alpha_ind] += np.sqrt(np.sum(np.power(value - TRUE_VALUE, 2)) / N_STATES)
# take average
errors /= episodes * runs
- (3~4) : n-step에서의 n을 의미하며 스텝의 개수를 나열한다, $\left [ 2^0, 2^1, …, 2^9 \right ]$를 의미한다.
- (6~7) : $\alpha$를 의미한다. $\left [ 0, 0.1, … 1.0 \right ]$을 나타낸다.
- (9~10) : 각각의 실행은 10번의 에피소드를 가진다.
- (12~13) : 100번의 독립시행을 가진다.
- 각 독립시행 안에서 같은 value table로 10번의 에피소드를 실행하고 시행이 끝나면 value table은 초기화한다.
- (15~16) : n-step은 행을 의미하고 $\alpha$는 열을 나타내는 평균 오차 테이블(행렬)을 만든다.
errors[1][1]은 n-step이 2이고 $\alpha=0.1$인 실행의 오차 평균을 나타낸다. - (17) : 100번의 독립시행을 한다.
- (18~19) : 하이퍼파라미터의 인덱스와 하이퍼파라미터값을
@@_ind,@@에 저장한다.steps의 두번째 값의 경우step_ind의 경우 1을 가지고(2번째)step은 $2^1=2$를 가진다. - (21) : 각 상태의 가치를 0으로 초기화한다.
N_STATES=19에서 양쪽의 Terminal State 2개를 합쳐N_STATES + 2개의 요소를 가진 배열을 만든다. - (22) : 한 시행에 할당된 에피소드를 반복한다(
episodes=10) - (23) :
temporal_difference함수에 해당하는 n-step, $\alpha$를 넣고 value table을 업데이트한다. - (24~25) : 추정 value를 실제 값과 비교하여 RMSE를 산출하고 해당 값을 오차 행렬의 해당 부분에 누적한다. $\text{Error}(n, \alpha) = \sqrt{\frac{1}{n}\sum_{s} (\hat{v}(s) - v(s))^2}$
- (26~27) : 각 누적된 에러를 episode * runs 만큼 나누어 평균을 취한다.