단단한 강화학습 코드 정리, chap2
단단한 강화학습 책의 코드를 공부하기 위해 쓰여진 글이다.
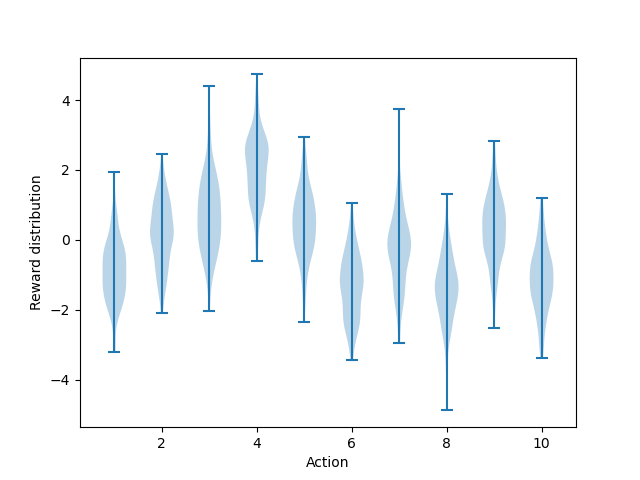
figure 2.1
1
2
3
4
5
6
def figure_2_1():
plt.violinplot(dataset=np.random.randn(200, 10) + np.random.randn(10))
plt.xlabel("Action")
plt.ylabel("Reward distribution")
plt.savefig('./images/figure_2_1.png')
plt.close()
numpy.random.randn: Return a sample (or samples) from the “standard normal” distribution.
(1)
dataset=np.random.randn(200, 10) + np.random.randn(10) : (200, 10) 크기의 표준 정규분포에 각 행마다 10개의 요소가 있을텐데 뒤의 (1, 10) 크기의 표준 정규분포를 각각 더한다, 뒤의 +np.random.randn(10)은 평행이동 역할을 한다. 해당 코드를 빼면 아래와 같은 모양이 나온다.
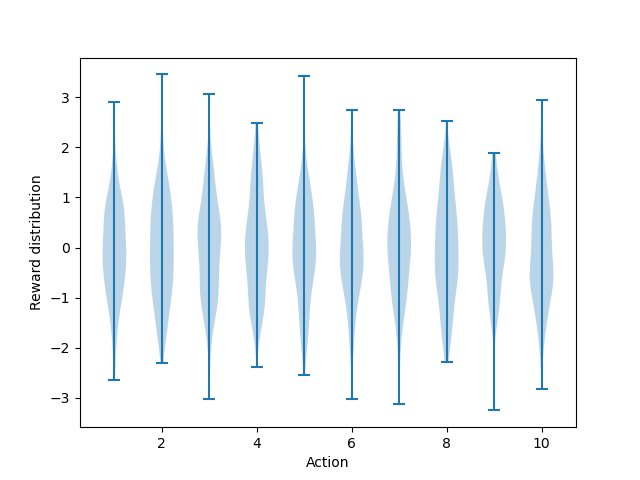
본 그림과 비교해보면 평균이 0에 더 가까운 것을 볼 수 있다.
violinplot : Make a violin plot for each column of dataset or each vector in sequence dataset.
각각의 column별로 값들을 plot한다
Bandit
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
class Bandit:
# @k_arm: # of arms
# @epsilon: probability for exploration in epsilon-greedy algorithm
# @initial: initial estimation for each action
# @step_size: constant step size for updating estimations
# @sample_averages: if True, use sample averages to update estimations instead of constant step size
# @UCB_param: if not None, use UCB algorithm to select action
# @gradient: if True, use gradient based bandit algorithm
# @gradient_baseline: if True, use average reward as baseline for gradient based bandit algorithm
def __init__(self, k_arm=10, epsilon=0., initial=0., step_size=0.1, sample_averages=False, UCB_param=None,
gradient=False, gradient_baseline=False, true_reward=0.):
self.k = k_arm
self.step_size = step_size
self.sample_averages = sample_averages
self.indices = np.arange(self.k)
self.time = 0
self.UCB_param = UCB_param
self.gradient = gradient
self.gradient_baseline = gradient_baseline
self.average_reward = 0
self.true_reward = true_reward
self.epsilon = epsilon
self.initial = initial
def reset(self):
# real reward for each action
self.q_true = np.random.randn(self.k) + self.true_reward
# estimation for each action
self.q_estimation = np.zeros(self.k) + self.initial
# # of chosen times for each action
self.action_count = np.zeros(self.k)
self.best_action = np.argmax(self.q_true)
self.time = 0
# get an action for this bandit
def act(self):
if np.random.rand() < self.epsilon:
return np.random.choice(self.indices)
if self.UCB_param is not None:
UCB_estimation = self.q_estimation + \
self.UCB_param * np.sqrt(np.log(self.time + 1) / (self.action_count + 1e-5))
q_best = np.max(UCB_estimation)
return np.random.choice(np.where(UCB_estimation == q_best)[0])
if self.gradient:
exp_est = np.exp(self.q_estimation)
self.action_prob = exp_est / np.sum(exp_est)
return np.random.choice(self.indices, p=self.action_prob)
q_best = np.max(self.q_estimation)
return np.random.choice(np.where(self.q_estimation == q_best)[0])
# take an action, update estimation for this action
def step(self, action):
# generate the reward under N(real reward, 1)
reward = np.random.randn() + self.q_true[action]
self.time += 1
self.action_count[action] += 1
self.average_reward += (reward - self.average_reward) / self.time
if self.sample_averages:
# update estimation using sample averages
self.q_estimation[action] += (reward - self.q_estimation[action]) / self.action_count[action]
elif self.gradient:
one_hot = np.zeros(self.k)
one_hot[action] = 1
if self.gradient_baseline:
baseline = self.average_reward
else:
baseline = 0
self.q_estimation += self.step_size * (reward - baseline) * (one_hot - self.action_prob)
else:
# update estimation with constant step size
self.q_estimation[action] += self.step_size * (reward - self.q_estimation[action])
return reward
(14):self.sample_averages:True일 경우 $Q(A) \leftarrow Q(A) + \frac{1}{N(A)}[R-Q(A)]$로 갱신(15):self.indices:arm의 개수 배열,k=10이면[0, 1, 2, ..., 9](17):self.UCB_param: UCB 공식 $Q_t(a)+c\sqrt{\frac{\ln t}{N_t(a)}}$ 에서 $c$를 의미한다.(27): 실제 $Q$ 값을 정의한다.(32): 실제 $Q$ 값 (q_true) 값을 토대로best_action을 정한다.(37~38):epsilon의 확률로self.indices중 하나를 무작위 선택 (=arm 중 하나를 무작위로 선택)(40~44): \(A_t \doteq \underset{a}{\text{argmax}} \left [ Q_t(a) + c \sqrt{\frac{\ln t}{N_t(a)}} \right ] \tag{2.10}\) 연산을 수행한다.
여기서는 연산의 편의를 위해 분자에 1, 분모에 작은 수를 더하여
\[A_t \doteq \underset{a}{\text{argmax}} \left [ Q_t(a) + c \sqrt{\frac{\ln t + 1}{N_t(a) + \epsilon}} \right ]\]로 계산하게 된다.
동일 값이 있을 경우 동일 값 중에서 랜덤으로 선택하기 위하여 q_best를 통해 최댓값을 구한 후 np.where을 통해 해당 인덱스를 추출한다. 그리고 np.random.choice를 통해 해당 인덱스 중 동일확률로 하나를 추출하여 리턴한다.
여기서 헷갈리면 안되는게 UCB는 $Q$를 통한 보조 수단일 뿐이지 Q의 갱신에는 직접적으로 관련이 없다.
(46~49): Gradient Bandit Algorithms를 위한 코드이다exp_est는 각 $Q$를 $e$의 지수승으로 만든다. 그리고 각각을np.sum(exp_est)으로 나누어서action_prob을 구하고(행동 선택 확률) 그 확률을 기반으로arm중에 하나를 선택한다.
np.random.choice의 p를 인자로 주면 해당 값들의 상대적인 확률로 리스트에서 뽑는다.
(51):self.q_estimation중 제일 큰 값을 선택하여q_best에 저장-
(52):np.where은 각 차원별로 같은 index를tuple로 반환하는데, 여기는 1행이므로 첫번째 차원만 선택하면 된다. 그러면q_best값과 같은 값을 가진 인덱스 중 하나를np.random으로 무작위로 하나 선택한다. (=q_best에 저장된 값과 같은 값을 가지는 arm 중 하나를 무작위로 선택한다.) (52)*
1
2
3
4
5
>>> test = np.array([[1, 2, 3, 3, 3, 6, 7], [2, 3, 4, 4, 4, 6, 7]])
>>> np.where(test == 3)
(array([0, 0, 0, 1], dtype=int64), array([2, 3, 4, 1], dtype=int64))
>>> type(np.where(test == 3))
<class 'tuple'>
(0,2), (0,3), (0,4), (1,1)이 해당된다는 뜻이다.
(57): 해당action의q_true에서 noise가 섞인reward를 설정한다.(60): $R_{avg} \leftarrow R_{avg} + \frac{1}{N}(R_n - R_{avg})$, 실제reward의 평균을 점근적으로 계산한다.(65~72):
의 식을 구현한 것이다.
코드를 이해하기 위해서는 두번째 줄의 마이너스를 $\pi_t(a)$쪽으로 옮겨서
\[H_{t+1}(A_t) \doteq H_t(A_t) + \alpha(R_t-\bar{R}_t)(1-\pi_t(A_t)), \quad \text{and} \\ H_{t+1}(a) \doteq H_t(A_t) + \alpha(R_t-\bar{R}_t)(0-\pi_t(a)), \quad \text{for all} \; a \neq A_t\]로 생각하면 이해가 될 것이다. one_hot 배열을 통해 action 에만 1을 할당한다. gradient_baseline이 True이면 baseline($\bar{R}_t$)에 지금까지 reward의 평균인 average_reward를 대입한다. 그 뒤에 한 줄로 (one_hot이 실제 action을 구분하고 나머지는 똑같다) 실제 action과 나머지 연산을 수행한다.
해당식은 $(R_t-\bar{R_t})$ 부분과 $(\text{one_hot}-\pi_t)$를 부호에 따라 분리하면 생각하기 편하다
- 실제 행동 $(\text{one_hot}-\pi_t) > 0$
- 평균보다
reward높다 $(R_t-\bar{R_t}) > 0$- $\text{update} > 0$ : 평균보다 높은 것을 하길 잘했으니 $Q$를 높인다.
- 평균보다
reward낮다 $(R_t-\bar{R_t}) < 0$- $\text{update} < 0$ : 평균보다 낮은 것을 하면 안됐으니 $Q$를 낮춘다.
- 평균보다
- 안한 행동 $(\text{one_hot}-\pi_t) < 0$
- 평균보다
reward높다 $(R_t-\bar{R_t}) > 0$- $\text{update} < 0$ : 평균보다 높은 것을 해야했다 $Q$를 낮춘다.
- 평균보다
reward낮다 $(R_t-\bar{R_t}) < 0$- $\text{update} > 0$ : 평균보다 낮은 것을 안하길 잘했으니 $Q$를 높인다.
- 평균보다
(75): $Q(A) \leftarrow Q(A) + \alpha(R_n - Q(A))$ 여기서 (default) :step_size=0.1(76): 해당step이후 얻은reward를 반환한다.
simulate
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
def simulate(runs, time, bandits):
rewards = np.zeros((len(bandits), runs, time))
best_action_counts = np.zeros(rewards.shape)
for i, bandit in enumerate(bandits):
for r in trange(runs):
bandit.reset()
for t in range(time):
action = bandit.act()
reward = bandit.step(action)
rewards[i, r, t] = reward
if action == bandit.best_action:
best_action_counts[i, r, t] = 1
mean_best_action_counts = best_action_counts.mean(axis=1)
mean_rewards = rewards.mean(axis=1)
return mean_best_action_counts, mean_rewards
(2~3): (figure 2.2) : (3, 2000, 1000)np.zeros생성(4): 각Bandit마다(5~7):r: 2000번마다 bandit을reset,t: 1000번(8):bandit의 현재 환경에서action선택(act())(9):(8)에서 선택된action을step한다(10):rewards(3, 2000, 1000) 에 저장한다. rewards[bandit의 종류, run, time](11~12):action이best_action일 경우best_action_counts에 1을 저장한다,i의bandit에서r번째runs에서t번째time에서 best action을 했다는 뜻(13~14):
numpy.mean : Compute the arithmetic mean along the specified axis.
해당 axis의 방향으로 mean을 구한다. 이 예제의 경우 (3, 2000, 1000)인데 axis=1의 방향으로 구하므로 해당 차원은 없어지게 된다. 결과적으로 (3, 1000)의 차원을 가지게 된다. 쉽게 풀어서 설명하면 3개의 bandit을 runs=2000번 돌려서 각 run은 time=1000번 진행하게 된다. 근데 나는 bandit과 time별로 결과를 평균하여 알고 싶으므로 run을 기준으로 mean연산을 하는 것이다.
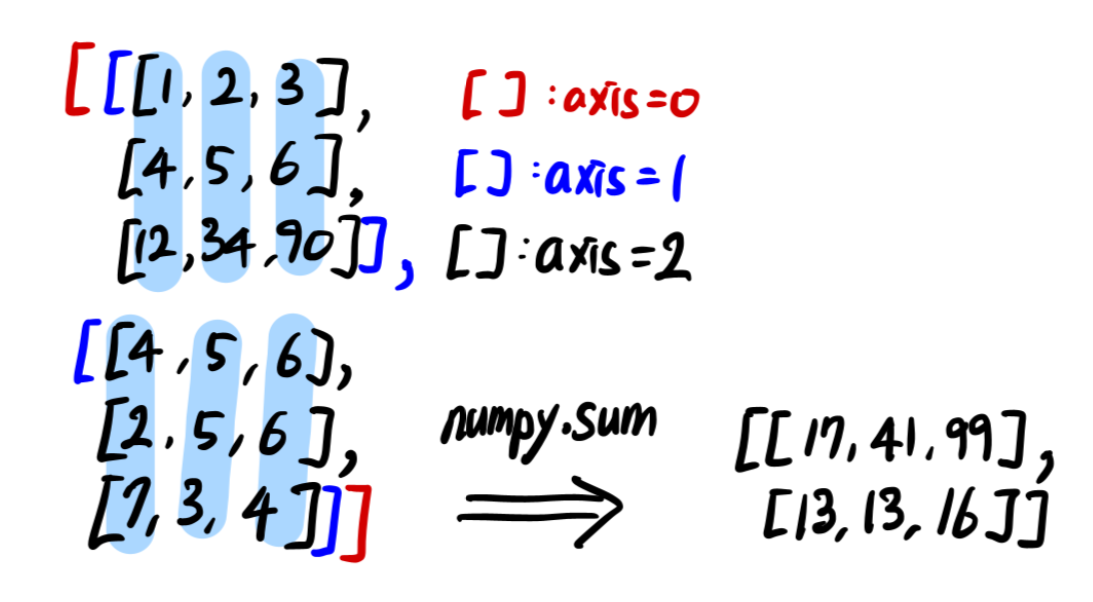
np.sum과 연산원리는 같다. 그림을 보면 이해가 도움이 될 것이다.
figure 2.2
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
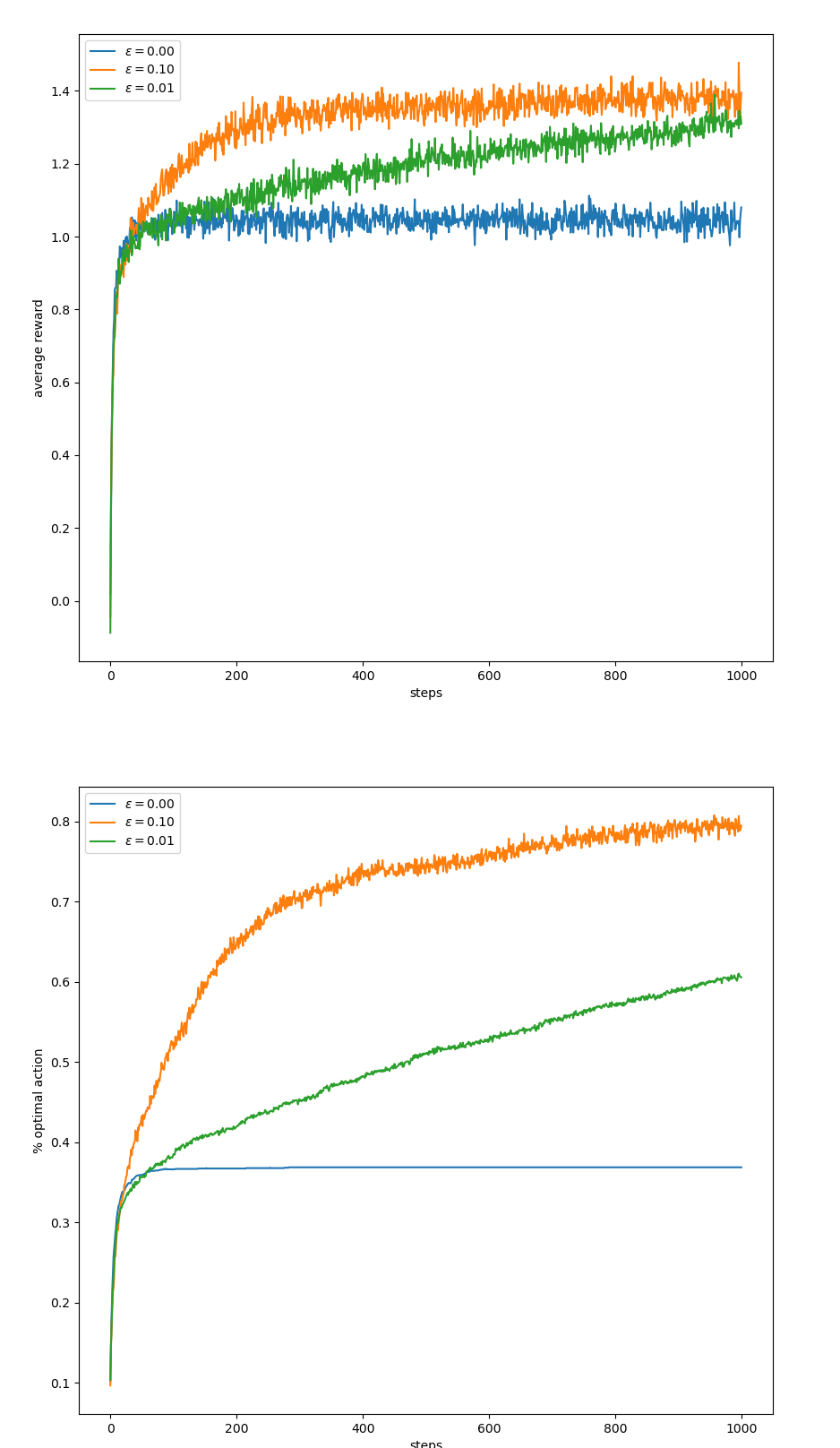
def figure_2_2(runs=2000, time=1000):
epsilons = [0, 0.1, 0.01]
bandits = [Bandit(epsilon=eps, sample_averages=True) for eps in epsilons]
best_action_counts, rewards = simulate(runs, time, bandits)
plt.figure(figsize=(10, 20))
plt.subplot(2, 1, 1)
for eps, rewards in zip(epsilons, rewards):
plt.plot(rewards, label='$\epsilon = %.02f$' % (eps))
plt.xlabel('steps')
plt.ylabel('average reward')
plt.legend()
plt.subplot(2, 1, 2)
for eps, counts in zip(epsilons, best_action_counts):
plt.plot(counts, label='$\epsilon = %.02f$' % (eps))
plt.xlabel('steps')
plt.ylabel('% optimal action')
plt.legend()
plt.savefig('./images/figure_2_2.png')
plt.close()
(3):sample_averages=True인Bandit클래스를epsilon별로 생성한다.(4):simulate의 결과를 받는다,shape=(3, 1000)(8~13):bandit별로 산출된step값이 plot된다, 각step값은runs=2000개의 평균이다.(15~20):bandit별로 산출된 best_action을 할 확률이며 나머지 내용은(8~13)`과 같다.
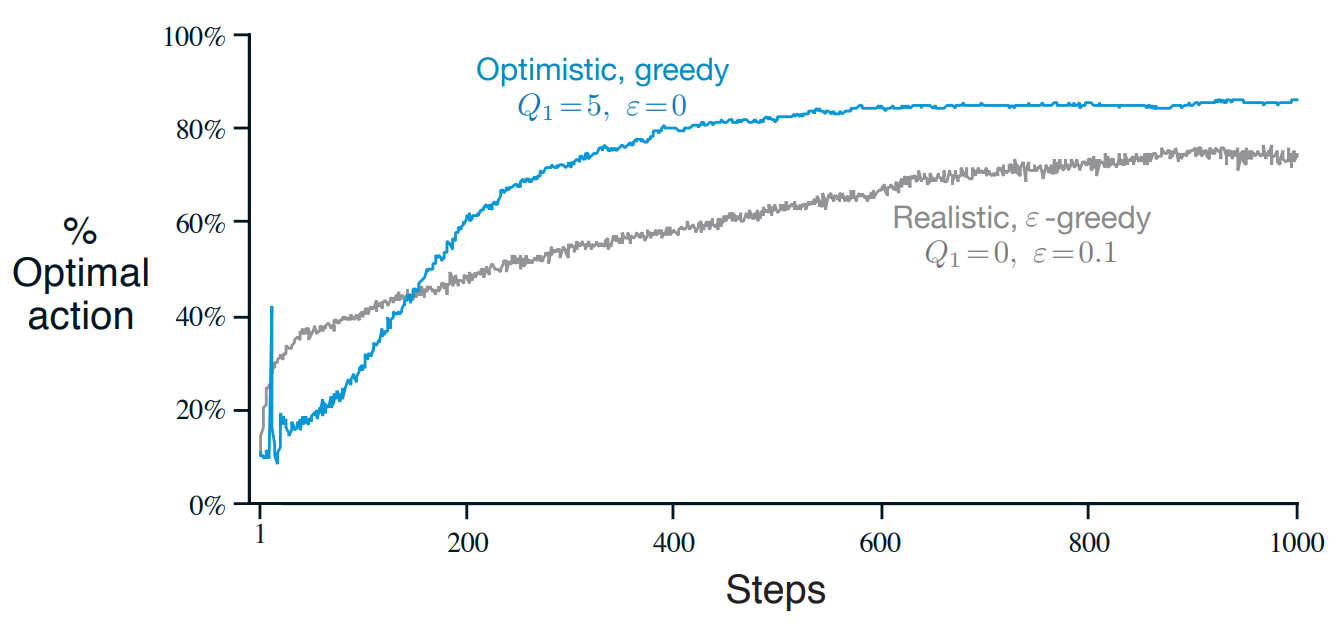
figure 2.3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
def figure_2_3(runs=2000, time=1000):
bandits = []
bandits.append(Bandit(epsilon=0, initial=5, step_size=0.1))
bandits.append(Bandit(epsilon=0.1, initial=0, step_size=0.1))
best_action_counts, _ = simulate(runs, time, bandits)
plt.plot(best_action_counts[0], label='$\epsilon = 0, q = 5$')
plt.plot(best_action_counts[1], label='$\epsilon = 0.1, q = 0$')
plt.xlabel('Steps')
plt.ylabel('% optimal action')
plt.legend()
plt.savefig('../images/figure_2_3.png')
plt.close()
(3):epsilon=0이고 (greedy), 초기값인initial=5로 하는 Bandit클래스를 생성하고bandits에append한다(4):epsilon=0.1이고 ($\epsilon$-greedy) 초기값을initial=0으로 하는 Bandit클래스를 생성하고bandits리스트에append한다
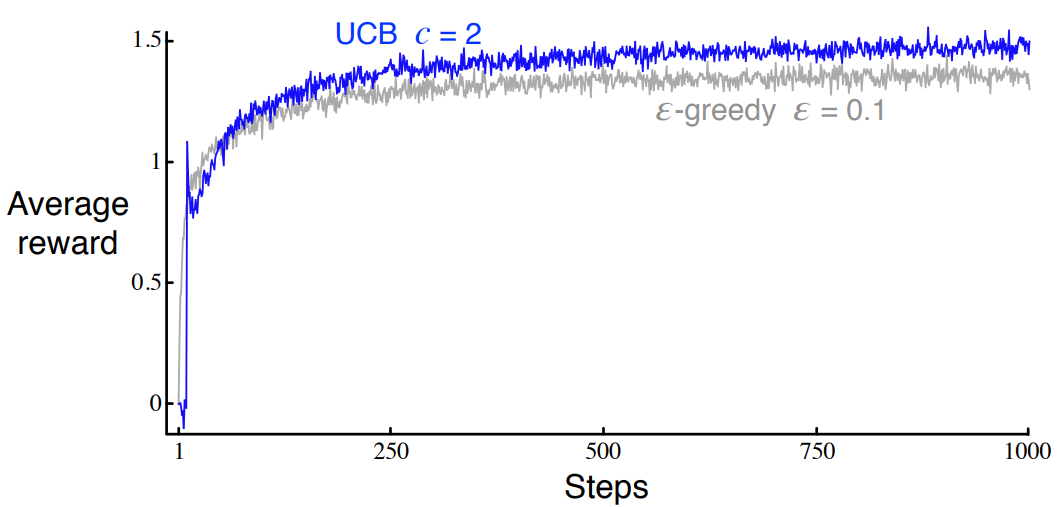
figure 2.4
1
2
3
4
5
6
7
8
9
10
11
12
13
14
def figure_2_4(runs=2000, time=1000):
bandits = []
bandits.append(Bandit(epsilon=0, UCB_param=2, sample_averages=True))
bandits.append(Bandit(epsilon=0.1, sample_averages=True))
_, average_rewards = simulate(runs, time, bandits)
plt.plot(average_rewards[0], label='UCB $c = 2$')
plt.plot(average_rewards[1], label='epsilon greedy $\epsilon = 0.1$')
plt.xlabel('Steps')
plt.ylabel('Average reward')
plt.legend()
plt.savefig('../images/figure_2_4.png')
plt.close()
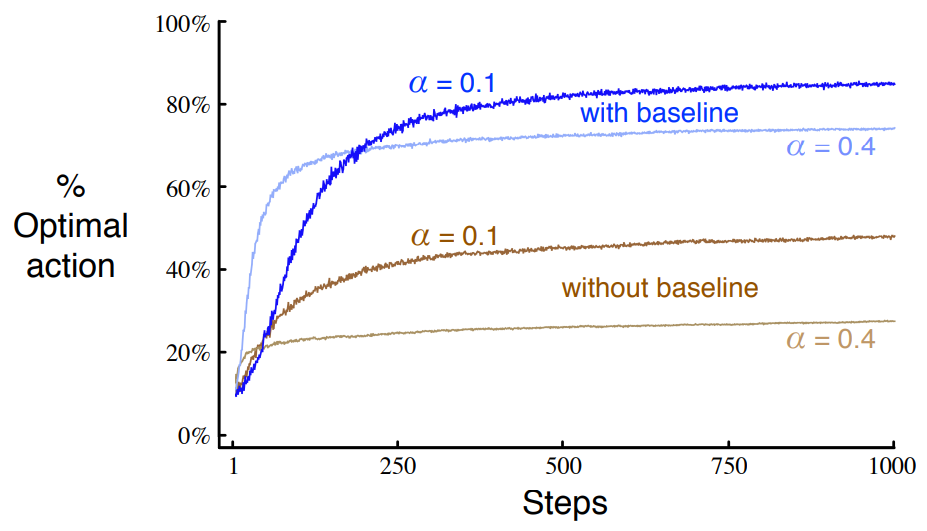
figure 2.5
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
def figure_2_5(runs=2000, time=1000):
bandits = []
bandits.append(Bandit(gradient=True, step_size=0.1, gradient_baseline=True, true_reward=4))
bandits.append(Bandit(gradient=True, step_size=0.1, gradient_baseline=False, true_reward=4))
bandits.append(Bandit(gradient=True, step_size=0.4, gradient_baseline=True, true_reward=4))
bandits.append(Bandit(gradient=True, step_size=0.4, gradient_baseline=False, true_reward=4))
best_action_counts, _ = simulate(runs, time, bandits)
labels = [r'$\alpha = 0.1$, with baseline',
r'$\alpha = 0.1$, without baseline',
r'$\alpha = 0.4$, with baseline',
r'$\alpha = 0.4$, without baseline']
for i in range(len(bandits)):
plt.plot(best_action_counts[i], label=labels[i])
plt.xlabel('Steps')
plt.ylabel('% Optimal action')
plt.legend()
plt.savefig('../images/figure_2_5.png')
plt.close()
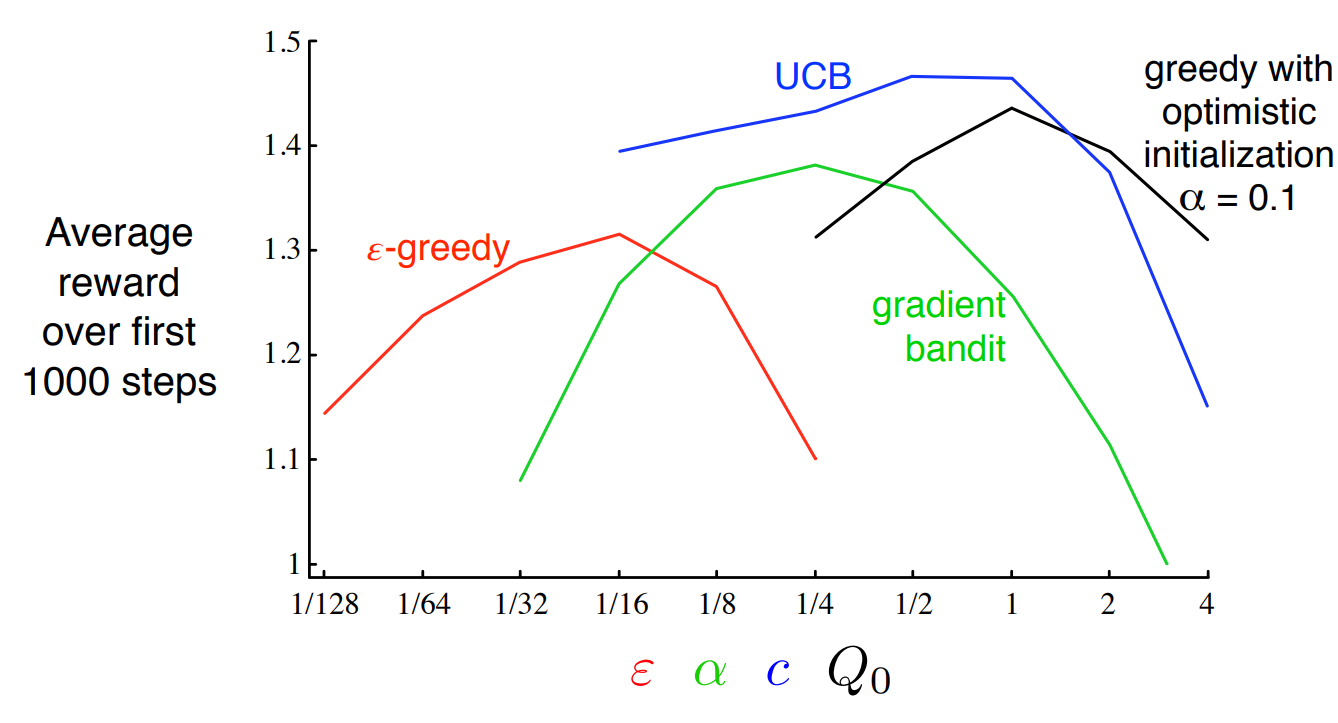
figure 2.6
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
def figure_2_6(runs=2000, time=1000):
labels = ['epsilon-greedy', 'gradient bandit',
'UCB', 'optimistic initialization']
generators = [lambda epsilon: Bandit(epsilon=epsilon, sample_averages=True),
lambda alpha: Bandit(gradient=True, step_size=alpha, gradient_baseline=True),
lambda coef: Bandit(epsilon=0, UCB_param=coef, sample_averages=True),
lambda initial: Bandit(epsilon=0, initial=initial, step_size=0.1)]
parameters = [np.arange(-7, -1, dtype=np.float),
np.arange(-5, 2, dtype=np.float),
np.arange(-4, 3, dtype=np.float),
np.arange(-2, 3, dtype=np.float)]
bandits = []
for generator, parameter in zip(generators, parameters):
for param in parameter:
bandits.append(generator(pow(2, param)))
_, average_rewards = simulate(runs, time, bandits)
rewards = np.mean(average_rewards, axis=1)
i = 0
for label, parameter in zip(labels, parameters):
l = len(parameter)
plt.plot(parameter, rewards[i:i+l], label=label)
i += l
plt.xlabel('Parameter($2^x$)')
plt.ylabel('Average reward')
plt.legend()
plt.savefig('../images/figure_2_6.png')
plt.close()
(4~7): 인자를 받아 해당 인자를Bandit클래스의 하이퍼파라미터에 대입하여 해당Bandit클래스를 리턴하는 람다 함수이다(8~11): 각각의np.arange는 $[a,b)$의 범위를 가지며 이후 2의 지수로 들어가게 된다(14~16): 각 index에 대응하는(n번째는 n번째끼리)generator과parameters를 얻고parameters를 풀어헤치면param이 나오는데 그param을 대응하는generator에 2의 지수승을 하여 넣어서 해당Bandit클래스를 얻고 그것을bandits리스트에 넣는다.
그림에서 UCB를 예로 들면 UCB는 $[-4,3)$ parameters를 가지고 그것은 2의 지수승이 되면서 $[1/16, 8)$ 의 범위를 갖는데 이것은 그래프와 맞다.